主办单位:煤炭科学研究总院有限公司、中国煤炭学会学术期刊工作委员会
Vision-based navigation and directional heading control technologies of boom-type roadheader
ZHANG Xuhui,ZHAO Jianxun,YANG Wenjuan,ZHANG Chao
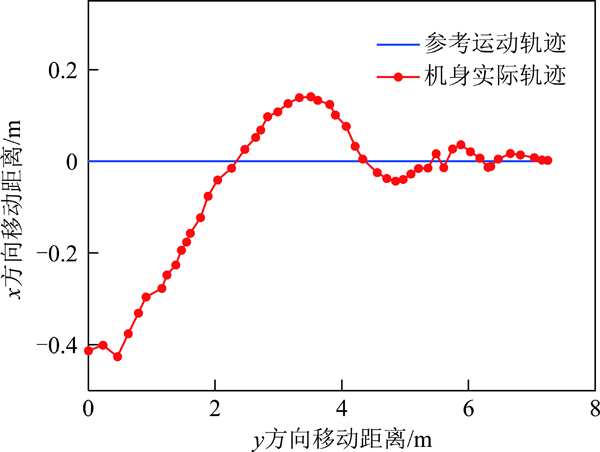
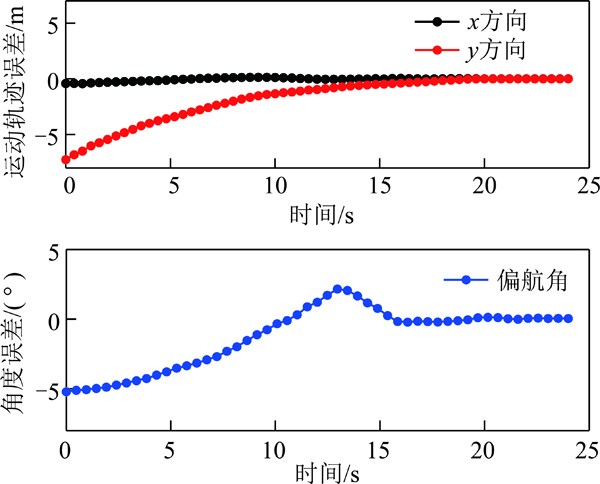
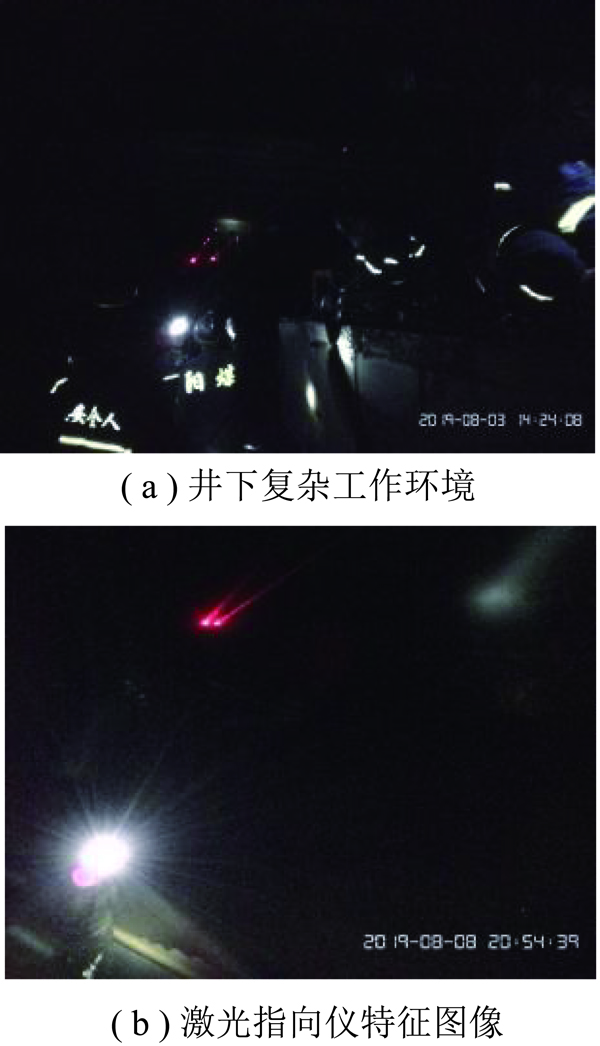
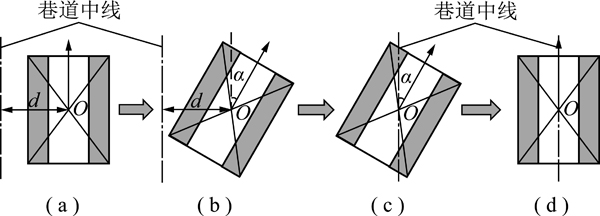
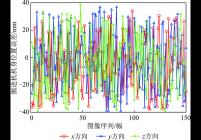
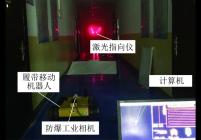
煤矿巷道掘进装备位姿测量是国内外目前研究的热点,不同的巷道快速掘进系统均面临定向导航难题。为解决煤矿井下悬臂式掘进机自动定向掘进控制难题,提出一种基于视觉导航的悬臂式掘进机自动定向掘进控制方法,利用单目视觉测量技术,以巷道中激光指向仪的激光点和激光束为特征构建基于门形结构的掘进机机身位姿视觉测量模型,通过空间矩阵变换解算巷道中机身位姿。根据悬臂式掘进机运动特点确定掘进机纠偏控制策略,基于悬臂式掘进机运动学建立掘进机定向掘进运动控制模型,采用backstepping方法,选取合适的Lyapunov函数设计掘进机轨迹跟踪控制器,有效解决掘进机轨迹跟踪控制问题。实验结果表明:悬臂式掘进机机身位姿视觉测量方法可有效实现井下工作环境中悬臂式掘进机机身的位姿测量,得到掘进机机身位置测量误差在±40 mm以内,姿态角角度测量误差在±0.3°以内;轨迹跟踪控制器可实现悬臂式掘进机的自动定向掘进功能,其运动控制精度在±20 mm以内,满足巷道施工的精度要求。该方法中工业相机固定安装于掘进装备机身,且利用激光指向仪点-线特征构建门型三线模型作为位姿测量基准,与相关研究对比,具有不易脱靶、标靶移动少等优点。
The posture measurement of coal mine tunneling equipment is currently a hot topic at home and abroad.At present,different tunnel rapid tunneling systems are facing directional navigation problems.In order to solve the problem of automatic directional tunneling control of cantilever rough-riders in coal mines,a method for automatic directional tunneling control of boom-type roadmenders based on visual navigation is proposed,using monocular visual measurement technology to use the laser point and laser beam of the laser pointer in the roadway To construct a feature-based visual measurement model of the boring machine’s posture based on the portal structure,the posture of the fuselage in the roadway is solved by spatial matrix transformation.According to the motion characteristics of the boom-type redheader,the rectification control strategy of the boring machine is determined.Based on the kinematics of the boom-type redheader,the directional tunneling motion control model of the boring machine is established.The backstepping method is used to select a suitable Lyapunov function to design the trajectory tracking controller of the roadheader,which can effectively solve the trajectory tracking control problem of the roadheader.The experimental results show that the boom-type redheader boring machine body position and attitude visual measurement method can effectively achieve the boom-type redheader boring machine body position and attitude measurement in the underground working environment,and the boring machine body position measurement error is within ±40 mm,and the attitude angle measurement The error is within 0.3°;the trajectory tracking controller can realize the automatic directional driving function of the boom-type redheader,and its motion control accuracy is within ±20 mm,which meets the accuracy requirements of roadway construction.In this method,the industrial camera is fixedly installed on the body of the tunneling equipment,and the point-line feature of the laser pointer is utilized to construct the portal three-line model as the reference for posture measurement.Compared with related research,it has the advantages of not easy to miss the target and less target movement.The research results provide theoretical and technical support for the intelligent maneuvering control of coal mine roadway rapid tunneling equipment.
vision-based navigation;directional heading control;boom-type roadheader;laser point-line feature;trajectory tracking control
1 悬臂式掘进机定向掘进控制方案
2 悬臂式掘进机位姿视觉测量方法
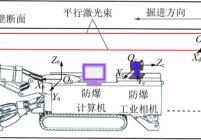
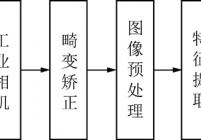
2.1 掘进机机身位姿视觉测量方案
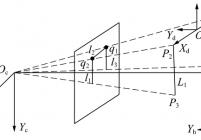
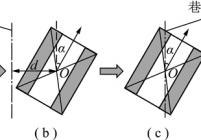
2.2 机身位姿视觉测量模型
2.3 掘进机机身位姿解算方法
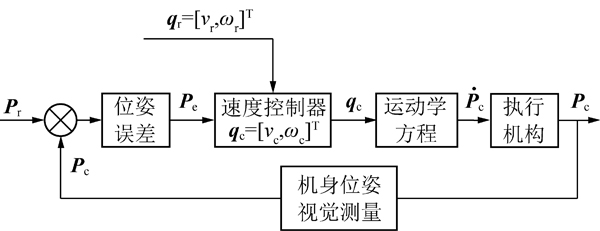
3 悬臂式掘进机定向掘进控制模型
3.1 掘进机纠偏控制策略
3.2 悬臂式掘进机定向掘进运动模型
4 轨迹跟踪控制器设计
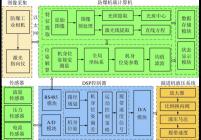
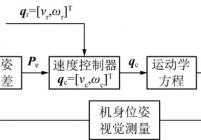
4.1 掘进机定向掘进控制系统
4.2 掘进机轨迹跟踪控制器设计
5 测量系统性能评价及实验结果分析
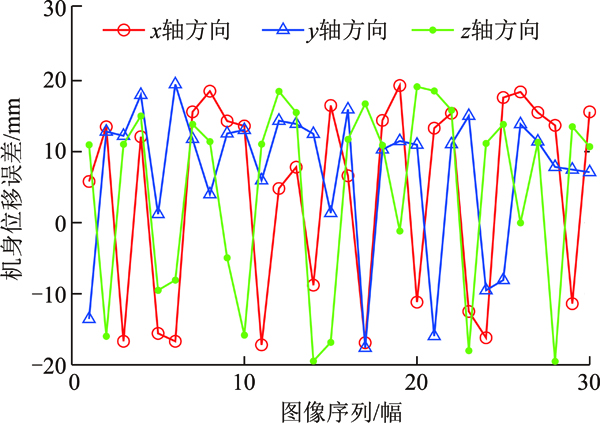
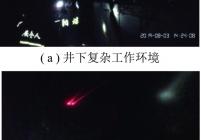
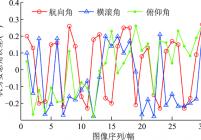
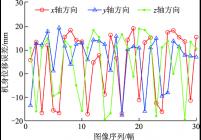
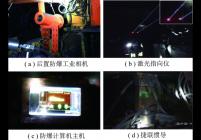
5.1 机身位姿视觉测量实验
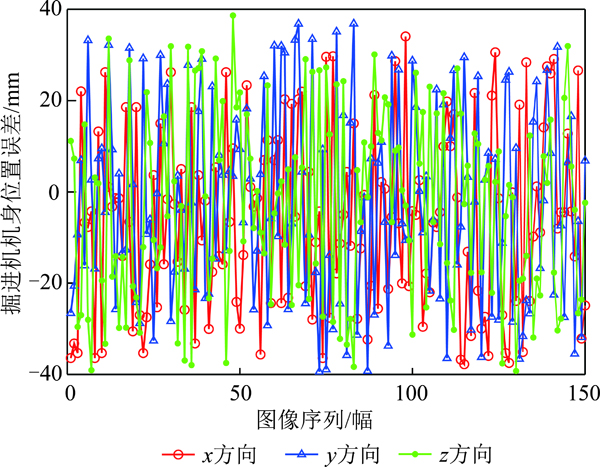
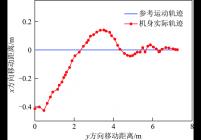
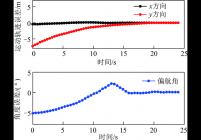
5.2 掘进机轨迹跟踪控制实验
6 结论




主办单位:煤炭科学研究总院有限公司 中国煤炭学会学术期刊工作委员会
 煤炭学报
煤炭学报  2021年第07期
2021年第07期  在线阅读
在线阅读