主办单位:煤炭科学研究总院有限公司、中国煤炭学会学术期刊工作委员会
Underground driverless path planning of trackless rubber tyred vehicle based on improved A∗ and artificial potential field algorithm
BAO Jiusheng;ZHANG Muye;GE Shirong;LIU Qin;YUAN Xiaoming;WANG Maosen;YIN Yan;ZHAO Liang
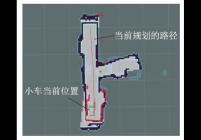
经过多年发展无人驾驶技术逐渐成熟,已经开始在地面车辆得到了广泛应用,同时也将成为解决无轨胶轮车在井下实现高效、安全、智能运输的重要途径,但与地面车辆成熟的无人驾驶技术不同,无人驾驶技术应用到井下仍存在许多问题亟待解决。针对井下人工驾驶的无轨胶轮车效率低且事故频发等问题,以无人驾驶无轨胶轮车为研究对象,通过仿真和试验开展井下路径规划方法研究。首先,通过分析比较常见路径规划算法的优缺点,分别选择采用最优性A*算法和人工势场算法作为无人驾驶无轨胶轮车全局和局部路径规划的基本算法;其次,针对全局路径规划传统A*算法搜索节点多和路径不平滑问题,分别使用指数函数加权和三次样条插值的方法对其进行改进,将改进前后算法在井下巷道内进行全局路径规划仿真,结果发现:改进后的算法搜索节点数减少了50%,在同一场景下规划路径所需时间仅为传统A*算法的20%,路径规划的效率得到了大幅度提升,生成的路径更加平滑且连续性也较好;同时,针对人工势场算法存在目标不可达、局部最优解等问题,分别引入斥力势场修正因子和出逃力并建立相对速度势场对其进行改进,对比改进前后算法在井下巷道内的局部路径规划仿真结果发现:改进后的人工势场算法可以在各种场景规划出更为合理的行车路径,安全性得到了保障;最后,利用微型无人车试验平台,按照8∶1的缩比搭建模拟井下巷道环境,对无人驾驶无轨胶轮车改进前后的路径规划算法分别进行了无障碍物和有障碍物的路径跟踪试验,结果表明:基于改进A*-人工势场联合算法规划出来的路径更加合理,在8∶1的缩比搭建模拟井下巷道环境中进行的无障碍物规划路径最大跟踪误差仅为0.031 2 m,在巷道内会车和避障时能够规划合理的行驶路径,最大偏差仅为0.035 3 m,能够满足无轨胶轮车井下无人驾驶要求。
After many years’development, the driverless technology has gradually matured and has begun to be widelyused in vehicles. At the same time, it will also become an important way to realize an efficient, safe and intelli⁃gent transportation for trackless rubber tyred vehicles underground. However, being different from the mature driver⁃less technology of surface vehicles, there are still many problems to be solved when driverless technology is appliedunderground. Aiming at the problems of low efficiency and frequent accidents of underground manually driventrackless rubber tyred vehicles, taking unmanned trackless rubber tyred vehicles as the research object, the under⁃ground path planning method is studied through simulation and test. Firstly, by analyzing and comparing the advanta⁃ges and disadvantages of common path planning algorithms, the optimal A∗ algorithm and artificial potential field al⁃gorithm are selected as the basic algorithms for the global and local path planning of unmanned trackless rubber tyredvehicles. Secondly, aiming at the problems of many search nodes and uneven path of the traditional A∗ algorithmfor global path planning, the methods of exponential function weighting and cubic spline interpolation are used to im⁃prove it respectively. The improved algorithm is simulated in the underground roadway. The results show that the num⁃ber of search nodes of the improved algorithm is reduced by 50%. In the same scenario, the time required to plan thepath is only 20% of that of the traditional A∗ algorithm, the efficiency of path planning has been greatly improved,and the generated path is smoother and has better continuity. At the same time, aiming at the problems of unreach⁃able target and local optimal solution in the artificial potential field algorithm, the repulsion potential field correctionfactor and escape force are introduced respectively, and the relative velocity potential field is established to improve it.The simulation results show that the improved artificial potential field algorithm can plan a more reasonable drivingpath in various scenarios, and the safety is guaranteed. Finally, using the micro unmanned vehicle test platform, thesimulated underground roadway environment is built according to the scale of 8 ∶ 1, and the obstacle free and obstaclepath tracking tests of the path planning algorithm before and after the improvement of the unmanned trackless rub⁃ber tyred vehicle are carried out respectively. The results show that the path planned based on the improved A∗⁃artifi⁃cial potential field joint algorithm is more reasonable, the maximum tracking error of obstacle free planning path in the8 ∶ 1 scale building simulation underground roadway environment is only 0.031 2 m. When meeting and avoiding ob⁃stacles in the roadway, it can plan a reasonable driving path, and the maximum deviation is only 0. 035 3m,which can meet the underground driverless requirements of trackless rubber tyred vehicles.
trackless rubber tyred vehicle; underground driverless; path planning; A∗ algorithm optimization; artifi⁃ cial potential field algorithm





























主办单位:煤炭科学研究总院有限公司 中国煤炭学会学术期刊工作委员会
 煤炭学报
煤炭学报  2022年第03期
2022年第03期  相关视频
相关视频 在线阅读
在线阅读