主办单位:煤炭科学研究总院有限公司、中国煤炭学会学术期刊工作委员会
Measuring technique of cantilever roadheader position based on binocular stereo vision
ZHANG Chao,ZHANG Xuhui,DU Yuyang,YANG Wenjuan,ZHANG Kaixin
煤矿井下巷道掘进过程中,高粉尘、低照度、背景复杂的工况环境导致掘进装备位姿检测困难,已经严重影响了巷道掘进的自动化、智能化进程,因此提出基于双目立体视觉的悬臂式掘进机位姿测量方法。悬臂式掘进机是当前巷道掘进主要装备,其运动特点呈现出移动缓慢、摆动大等特点,分析了当前掘进机位姿检测研究现状,构建了悬臂式掘进机双目视觉位姿测量方案与测量结构。说明了双目立体视觉基本测量原理,相比于单目视觉,双目立体世界可以比较容易地计算出特征深度信息。煤矿井下低照度、高粉尘、高水雾的复杂工况下存在着严重的特征信息缺失,红外LED光源具有稳定性和穿透性,可以较好地适应复杂的掘进工况环境,因此将红外LED光源组成图像测量标靶人为构造图像特征来解决特征选取问题。采用高斯拟合法实现光斑中心点特征的快速精确提取,并在此基础上提出了基于时域图像序列的特征点环形匹配方法并验证了其有效性,最后采用3D-3D运动估计方法实现了位姿参数求解。针对双目视觉测量距离有限的情况,设计了双标靶交替移动测量策略,实现连续不间断测量。最后搭建实验验证平台,结果表明:该测量方法在X方向即横向位移的测量误差在±30 mm,航向角的测量误差在±1°以内,满足煤矿井下巷道掘进的要求。
In the process of tunneling in underground coal mines, high dust, low illumination, and complex background conditions make it difficult to detect the attitude of the tunneling equipment, which has seriously affected the automation and intelligence process of tunnel tunneling. Therefore, a method for measuring the position and posture of cantilever roadheader based on binocular vision was proposed. Boom roadheader is currently the main equipment for roadway excavation, and its motion characteristics show slow movement and large swing. and the status quo of position and posture measurement technology of machine body of tunneling equipment were analyzed. Combined with the working characteristics of the roadheader, the binocular vision measurement scheme and measurement structure were constructed. Under the complex working conditions of low illumination, high dust and high water mist in coal mines, there was still serious lack of characteristic information. The infrared LED light source has good stability and penetrability and can well adapt to the complex driving environment. The Gaussian fitting method was used to realize the fast and accurate extraction of the characteristics of the spot center point. On this basis, a feature point ring matching method based on the time domain image sequence was proposed and its effectiveness was verified. The 3D-3D motion estimation method was used to achieve the pose parameters. In view of the limited distance of binocular vision measurement, the dual-target moving measurement strategy was designed to realize continuous and uninterrupted measurement.Finally, the experimental verification platform was built. The results show that the measurement error of the method in the X direction that isthe lateral displacement is ±30 mm,and the measurement error of heading angle is within ±1°, which meets the requirements of underground roadway excavation in coal mines.
binocular vision; cantilever roadheader; pose measurement;gaussian fitting method;region growing algorithm
0 引言
1 双目视觉测量方案
1.1 双目视觉测量原理
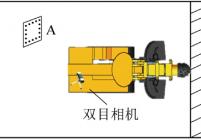
1.2 悬臂式掘进机双目视觉位姿测量方案
2 双目图像特征选取
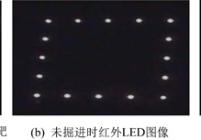
2.1 红外LED图像特征
2.2 红外LED图像井下应用
3 特征提取与匹配
3.1 特征提取
3.2 特征点匹配
4 悬臂式掘进机运动估计
5 双目视觉位姿测量策略
6 试验结果与分析
7 结论



























主办单位:煤炭科学研究总院有限公司 中国煤炭学会学术期刊工作委员会
 煤炭科学技术
煤炭科学技术  2021年第11期
2021年第11期  在线阅读
在线阅读