主办单位:煤炭科学研究总院有限公司、中国煤炭学会学术期刊工作委员会
Study on accurate positioning method and its visual measurement technology of cantilever roadheader underground
ZHAO Jianxun,YANG Wenjuan,ZHANG Xuhui,DU Yuyang,ZHANG Chao
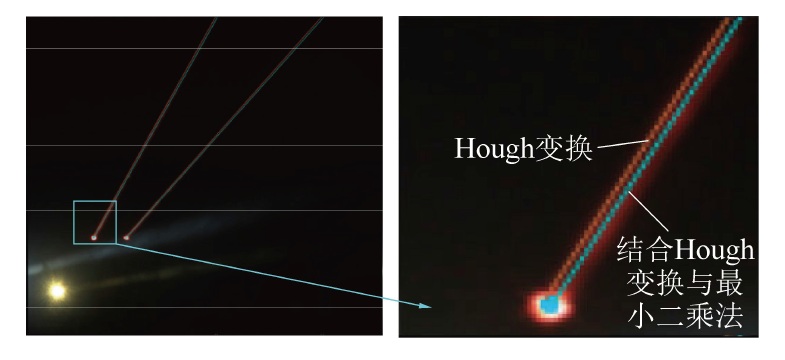
为解决煤矿井下低照度、高粉尘环境中悬臂式掘进机机身位姿测量问题,提出一种以激光点和激光束为特征的悬臂式掘进机机身位姿视觉测量技术。利用单目视觉测量原理,采用基于门形三线的视觉测量模型,根据激光特性对利用防爆工业相机采集的巷道图像进行处理,通过Hough变换与最小二乘法结合,获取得到2个激光指向仪的光斑和光束的点、线特征,通过空间矩阵变换计算出悬臂式掘进机机身的空间位姿。研究发现Hough变换与最小二乘法结合有效保证了杂光、粉尘和水雾等复杂背景下孤立点的消除,提高了激光点和激光线的检测精度。为验证所提出方法的有效性,分别在实验室悬臂式掘进机测试平台和煤矿井下工业现场进行位姿测量试验,实验室结果表明,结合Hough变换与最小二乘法进行特征提取得到机身位置误差在20 mm以内,姿态误差在0.3°以内,误差满足精度要求且小于使用传统Hough变换进行特征提取得到的位姿;煤矿井下工业试验表明,机身测量误差在40 mm以内,满足巷道掘进精度要求。
In order to solve posture measurement problem of Boom-type Roadheader under low illumination and high dust underground environment in coal mine,this paper put forward a accurate positioning measurement method using camera which acquire image data included features of laser points and laser beam. Based on monocular vision positioning principle of three line,an explosion-proof industrial camera was used to acquire tunnel images and process according to the feature of laser. Combining the advantage of Hough transform and least squares method,the characteristics of points and beams of two laser alignment which amounted on Boom-type Roadheader was extracted,then body posture was calculated through space matrix transformation space. It is found that the combination of Hough transform and least square method can effectively eliminate the isolated points in the complex background such as stray light,dust and water mist,and improve the detection accuracy of laser point and laser line. In order to verify the effectiveness of the proposed method,the pose measurement experiments were carried out on a laboratory cantilever tunneling machine test platform and a coal mine underground industrial site. Laboratory experiments showed that combining the Hough transform and the least squares method for feature extraction to obtain the fuselage position error within 20 mm,the attitude error is within 0.3°,the error meets the accuracy requirements and is smaller than the pose obtained by using the traditional Hough transform for feature extraction;the industrial test underground in coal mine shows that the measurement error of the fuselage is within 40 mm,which meets the requirement of roadway driving accuracy.
cantilever roadheader; visual measurement; accurate position; laser feature extraction; monocular vision
0 引言
1 悬臂式掘进机位姿视觉测量模型
1.1 系统构成
1.2 掘进机机身位姿解算模型
2 激光光斑中心定位
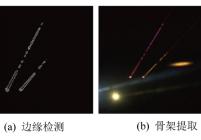
3 激光束直线特征提取
3.1 激光束直线特征提取流程
3.2 激光束图像处理
3.3 结合Hough变换与最小二乘法的直线检测
4 掘进机机身位姿参数解算
5 试验及结果分析
5.1 掘进机机身位姿测量试验
5.2 煤矿井下工业试验
6 结论














主办单位:煤炭科学研究总院有限公司 中国煤炭学会学术期刊工作委员会
 煤炭科学技术
煤炭科学技术  2021年第12期
2021年第12期  在线阅读
在线阅读